UR5e + Robotiq MoveIt2 연동 삽질… 4시간 날리고 깨달은 점
오늘은 진짜 역대급 삽질을 했다. Gazebo랑 MoveIt2 연결해서 Rviz2에 띄우려고 시작했는데, 4시간 동안 화면만 쳐다보다 끝날 줄이야…
1. 시작은 창대했으나… (URDF, SRDF 준비)
Gazebo에 로봇 띄우려면 URDF가 필요하고, MoveIt에 연결하려면 SRDF가 필수라고 해서 작업을 시작했다. 로봇은 국룰 조합인 UR5e에 Robotiq 앤드 이펙터다.
원래는 MoveIt Setup Assistant 켜서 클릭 몇 번 하면 SRDF가 뚝딱 나와야 하는데, 내 컴퓨터 사양이 진짜… 똥컴이라 그런지 실행조차 안 된다. 결국 포기하고 그냥 되는대로 잼민이한테 SRDF 만들어달라고 던져줬더니 뭔가를 주긴 해서 이거 쓸 예정이다.
2. [ERROR] Unexpected type for parameter value None
그렇게 만든 URDF랑 SRDF를 한 패키지에 넣고 예제 코드 살짝 변형해서 띄우려는데 바로 에러가 터졌다.
[ERROR] [launch]: Caught exception in launch: Unexpected type for parameter value None
뭐가 문젠지 찾아봤는데, 알수 없는 곳에서 값을 받아야하는데 None이 들어와서 그렇다고 한다.
해결 방법도 딱히 없단다.
데이터 흐름 분석 (왜 None이 떴을까?)
- Input: Launch 파일이
xacro명령어를 실행해서 로봇 모델을 불러옴. - Logic:
robot_description변수에 파일 내용을 담아야 하는데, 경로가 꼬였거나 파일이 비어있어서 None 값이 전달됨. - Output: 파라미터에
None이 들어가니까 로드 노드가 뻗어버림.
처음엔 이상한 곳에서 XML파일이 존재한다고 해서 주변 XML 파일을 다 없애고 (사실 이 디렉토리 바로 위에 블로그 디렉토리가 존재한다.) 이거 말고도 yaml파일이 비어있다고 해서 여기도 다시 한번 다 정리했다. 이래도 문제가 안 고쳐져서 결국 런치파일을 하나하나 다 디벼보면서 다시 만드니까 고쳐지기는 했다. 근데 문제는 또 생긴다.
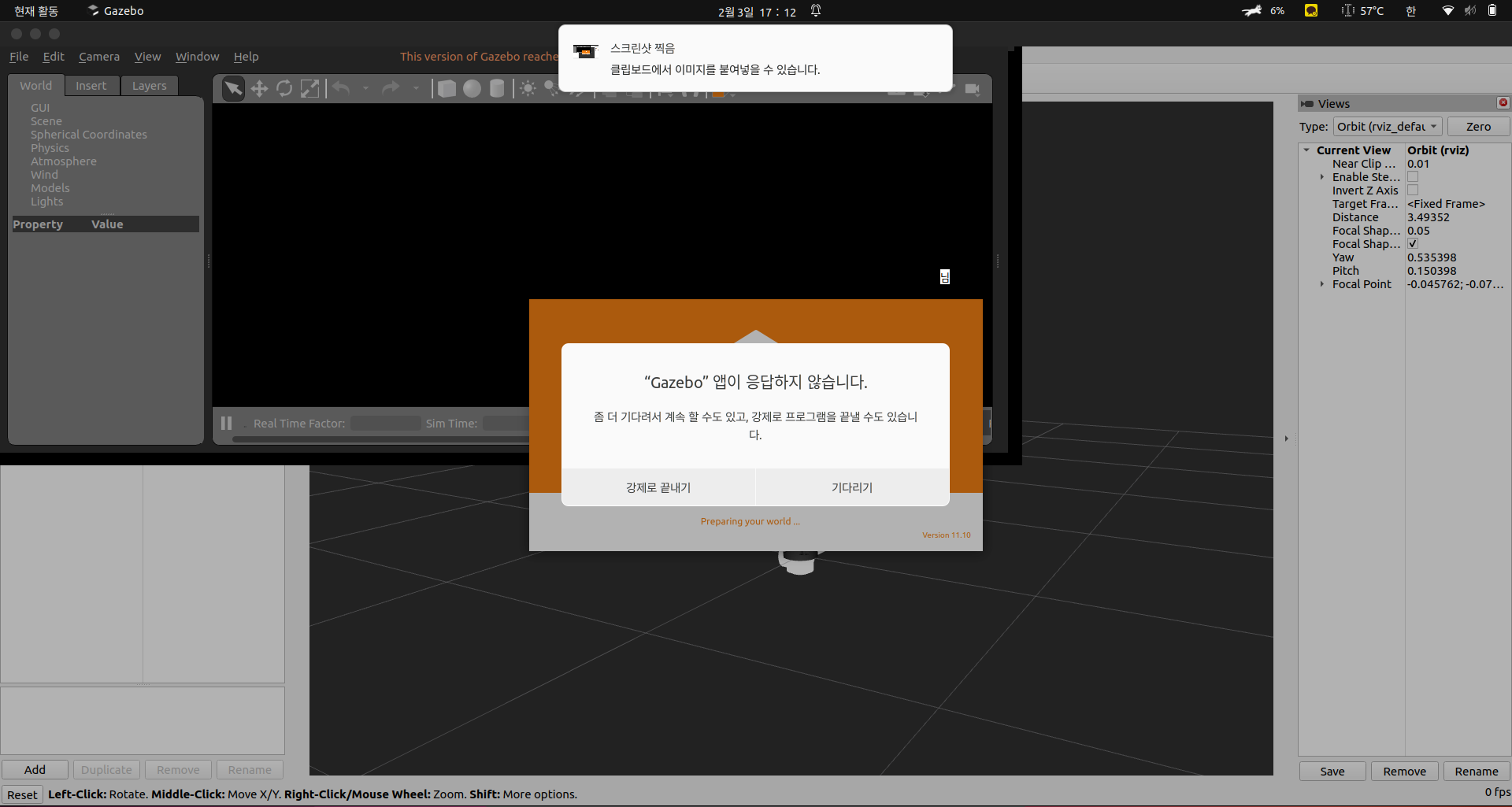
3. Gazebo는 왜 안 켜지는데?
SRDF 연결 성공하자마자 이번엔 Gazebo가 안 켜진다. 한 6시간 만졌나? 진짜 화나서 모니터 부술 뻔했다. ㅠㅠㅠㅠㅠ 이정도 되면 다시 처음부터 다시 만드는게 더 싸게 먹힐거 같다…
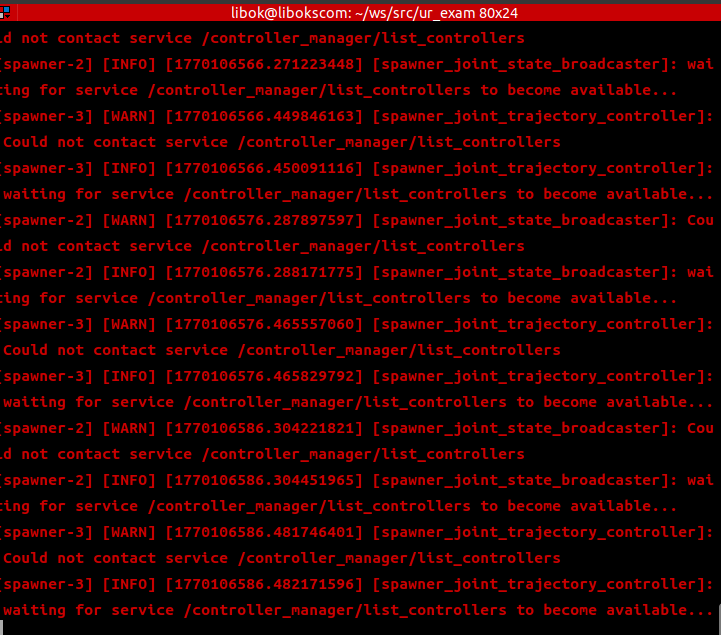
현업 용어로 따지면 이건 Controller Manager랑 하드웨어 인터페이스 간의 핸드셰이킹 실패란다.
- 데이터 흐름:
MoveIt (Command)->Controller Manager->Gazebo Plugin. - Gazebo가 로드될 때
ros2_control플러그인이 로봇 관절 데이터를 제대로 못 긁어오니까 전체 프로세스가 데드락(Deadlock)에 걸린 상태인 것 같다. ROS2 만들때 잘좀 만들지 왜 이렇게 만들었을까 ㅠㅠㅠㅠ
어떻게 잼민이랑 백문백답을 진행했는데 얻은 결론은 처음 부터 다시 만들기다. 지금까지 쓴 시간이 너무 아쉽지만 어쩔수 없다. 이렇게 스파게티로 쑤셔놓은 코드는 밥도 안될거고 만약 원하는 기능을 구현한다 하더라도 나중에 보면 이상한 곳에서 에러가 분명히 생길 것이다.
4. 결론 및 저장
오늘의 교훈: 툴이 안 되면 노가다라도 해야 하는데, 그 노가다도 데이터 흐름을 모르면 답이 없다. 4시간 삽질하고 아직 Gazebo는 못 띄웠지만, 일단 런치 파일이랑 SRDF 구조는 마스터했으니 내일은 무조건 띄운다.
ㅠㅠ 연구실 일도 해야하는데 며칠째 이걸로 고생하는지 모르겠다. 언젠간 URDF, Gazebo 마스터하고 다음 단계로 나갔으면 좋겠다.
Comments